


Membuat Robot Line Follower Analog
Senin, 20 Februari 2012
Label:
Belajar Robot
nah… kali ini q mau share mengenai cara membuat robot line follower analog, apa sich maksudnya analog dan apa bedanya dengan digital…. robot line follower analog tidak perlu adanya pemrograman robot secara software (perangkat lunak) sedangkan line follower mikro (digital) melibatkan software…itu sich cuman salah satu dasar perbedaannya, untuk perbedaan yang laen…apa ya… pokoknya itu dech, hehe…
buat kamu-kamu yang baru saja tertarik pada dunia robot dan pengen banget membuat robot maka belajar lah dahulu dari yang dasar, nach membuat robot line follower analog merupakan dasar-dasar dari merancang robot…(q dulu belajarnya dari analog…) tentu saja nanti berkembang menuju digital…
apa saja sich komponen dasar dari sistem robot itu….? setau ku robot terdiri dari komponen input (masukkan, contohnya sensor), pengolah dan output (keluaran), nach sistem robot line follower analog belum lah kompleks jika dibandikan dengan robot seperti humanoid contoh ASIMO,… untuk dasar membuat robot kita gak perlu membuat robot asimo, hehe susah banget kali…., line follower analog juga dah bisa dikatakan robot, sebab dikatakan robot jika benda tersebut telah dapat begerak atw berjalan secara automatik tanpa bantuan operator.
komponen dasar dari sistem robot:

hmmm tulis apa lagi ya…. langsung aja dech nich q share salah satu rangkaian dari robot line follower analog….
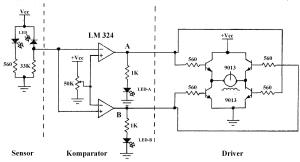
rangkaian Line Follower Analog diatas terdapat 3 bagian utama, yaitu bagian sensor, komparator dan driver. Untuk bagian sensor digunakan photodioda sebagai sensor cahaya, sedangkan komparatornya menggunakan IC LM 324 sebagai pembanding tegangan dan untuk drivernya digunakan H- Bridge Transistor.
Cara kerja dari rangkaian-rangkaian Line Follower Analog tersebut adalah sebagai berikut :
A. Prinsip Kerja Sensor
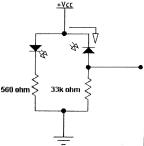
Sensor yang digunakan terdiri dari photo dioda. Sensor ini nilai resistansinya akan berkurang bila terkena cahaya dan bekerja pada kondisi riverse bias. Untuk sensor cahayanya digunakan LED Superbright, komponen ini mempunyai cahaya yang sangat terang, sehingga cukup untuk mensuplai cahaya ke photo dioda.
Gambar Rangkaian sensor

Cara kerjanya :
Gambar Sensor tidak terkena cahaya
Jika photo dioda tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat kita asumsikan tak hingga. Sehingga arus yang mengalir pada komparator sangat kecil atau dapat diasumsikan dengan logika 0.

Gambar Sensor terkena cahaya
Jika photo dioda terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1.
B. Prinsip Kerja Komparator
Komparator pada rangaian ini menggunakan IC LM 324 yang didalamnya berisi rangkaian Op Amp digunakan untuk membandingkan input dari sensor. Dimana input akan dibandingkan dari Op Amp IC LM 324 yang output berpulsa high. Sehingga tidak perlu adanya pull up pada outputnya. IC ini dapat bekerja pad range 3 volt sampai 30 volt dan dapat bekerja dengan normal mulai tegangan 6 volt.
Dalam rangkaian ini juga terdapat 4 LED, yang berfungsi sebagai indikator. Untuk mengatur tagangan pada pembanding, disambungkan Variable Resistor (VR) diantara kedua OP Amp IC LM 324. Untuk datasheet LM324 silakan unduh disini.
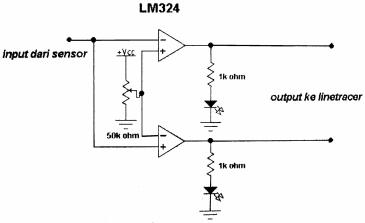
Gambar Rangkaian komparator
► Jika tidak ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini adalah 0 Volt, akibatnya pada IC 1 tegangan di terminal ( + ) > ( – ), maka LED-A on, sedangkan pada IC 2 sebaliknya LED-B off.
► Jika ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini mendekati Vcc, akibatnya pada IC 2 tegangan di terminal ( + ) < ( – ), maka LED-B on, sedangkan pada IC 1 sebaliknya maka LED-A off. Kondisi antara titik A dan B akan selalu keterbalikan. C. Prinsip Kerja Driver Motor Driver adalah rangkaian yang tersusun dari transistor yang digunakan untuk menggerakkan motor DC. Dimana komponen utamanya adalah transistor yang dipasang sesuai karakteristiknya.
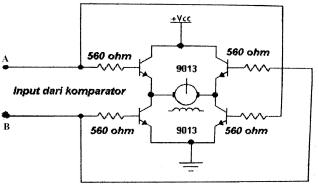
Gambar Rangkaian driver H-Bridge Transistor
Pada saat input A berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 1 dan 4 on karena basis terbias, sehingga motor berputar. Sehingga saat input A berlogika 1 maka input B akan berlogika 0, jadi transistor 2 dan 3 akan off.
Pada saat input B berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 2 dan 3 on karena basis terbias, sehingga motor berputar tapi dengan arah yang berlawanan.
untuk lebih lengkap mengenai penjelasan rangkaian tersebut, kalian dapat memdownload makalah robot line follower analog disini…Selamat mencoba…

buat kamu-kamu yang baru saja tertarik pada dunia robot dan pengen banget membuat robot maka belajar lah dahulu dari yang dasar, nach membuat robot line follower analog merupakan dasar-dasar dari merancang robot…(q dulu belajarnya dari analog…) tentu saja nanti berkembang menuju digital…
apa saja sich komponen dasar dari sistem robot itu….? setau ku robot terdiri dari komponen input (masukkan, contohnya sensor), pengolah dan output (keluaran), nach sistem robot line follower analog belum lah kompleks jika dibandikan dengan robot seperti humanoid contoh ASIMO,… untuk dasar membuat robot kita gak perlu membuat robot asimo, hehe susah banget kali…., line follower analog juga dah bisa dikatakan robot, sebab dikatakan robot jika benda tersebut telah dapat begerak atw berjalan secara automatik tanpa bantuan operator.
komponen dasar dari sistem robot:
hmmm tulis apa lagi ya…. langsung aja dech nich q share salah satu rangkaian dari robot line follower analog….
rangkaian Line Follower Analog diatas terdapat 3 bagian utama, yaitu bagian sensor, komparator dan driver. Untuk bagian sensor digunakan photodioda sebagai sensor cahaya, sedangkan komparatornya menggunakan IC LM 324 sebagai pembanding tegangan dan untuk drivernya digunakan H- Bridge Transistor.
Cara kerja dari rangkaian-rangkaian Line Follower Analog tersebut adalah sebagai berikut :
A. Prinsip Kerja Sensor
Sensor yang digunakan terdiri dari photo dioda. Sensor ini nilai resistansinya akan berkurang bila terkena cahaya dan bekerja pada kondisi riverse bias. Untuk sensor cahayanya digunakan LED Superbright, komponen ini mempunyai cahaya yang sangat terang, sehingga cukup untuk mensuplai cahaya ke photo dioda.
Gambar Rangkaian sensor
Cara kerjanya :
Gambar Sensor tidak terkena cahaya
Jika photo dioda tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat kita asumsikan tak hingga. Sehingga arus yang mengalir pada komparator sangat kecil atau dapat diasumsikan dengan logika 0.
Gambar Sensor terkena cahaya
Jika photo dioda terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1.
B. Prinsip Kerja Komparator
Komparator pada rangaian ini menggunakan IC LM 324 yang didalamnya berisi rangkaian Op Amp digunakan untuk membandingkan input dari sensor. Dimana input akan dibandingkan dari Op Amp IC LM 324 yang output berpulsa high. Sehingga tidak perlu adanya pull up pada outputnya. IC ini dapat bekerja pad range 3 volt sampai 30 volt dan dapat bekerja dengan normal mulai tegangan 6 volt.
Dalam rangkaian ini juga terdapat 4 LED, yang berfungsi sebagai indikator. Untuk mengatur tagangan pada pembanding, disambungkan Variable Resistor (VR) diantara kedua OP Amp IC LM 324. Untuk datasheet LM324 silakan unduh disini.
Gambar Rangkaian komparator
► Jika tidak ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini adalah 0 Volt, akibatnya pada IC 1 tegangan di terminal ( + ) > ( – ), maka LED-A on, sedangkan pada IC 2 sebaliknya LED-B off.
► Jika ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini mendekati Vcc, akibatnya pada IC 2 tegangan di terminal ( + ) < ( – ), maka LED-B on, sedangkan pada IC 1 sebaliknya maka LED-A off. Kondisi antara titik A dan B akan selalu keterbalikan. C. Prinsip Kerja Driver Motor Driver adalah rangkaian yang tersusun dari transistor yang digunakan untuk menggerakkan motor DC. Dimana komponen utamanya adalah transistor yang dipasang sesuai karakteristiknya.
Gambar Rangkaian driver H-Bridge Transistor
Pada saat input A berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 1 dan 4 on karena basis terbias, sehingga motor berputar. Sehingga saat input A berlogika 1 maka input B akan berlogika 0, jadi transistor 2 dan 3 akan off.
Pada saat input B berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 2 dan 3 on karena basis terbias, sehingga motor berputar tapi dengan arah yang berlawanan.
untuk lebih lengkap mengenai penjelasan rangkaian tersebut, kalian dapat memdownload makalah robot line follower analog disini…Selamat mencoba…
![]() About Author
About Author
Write anything about you here!





0 komentar:
Posting Komentar